Arşiv
HC-06 Bluetooth Modülü Konfigürasyonunun Yapılması
Bu çalışmada robotik çalışmalarda sıkça kullanılan bluetooth modülü temel konfigürasyonunun nasıl yapıldığı ele alınmaktadır. Modüllerde isim ve şifre gibi temel değişiklikler ile etraftaki diğer modüllerle/cihazlarla karışıklık önlenebilmektedir.
Bluetooth modülü konfigürasyonu için “Arduino Nano Tabanlı Eğitim Robotu: myNanoBot” çalışmasında tercih edilen HC-06 modülü ve bu modül üzerinde yapılan değişikliklere örnek olarak yer verilmiştir.
Burada anlatılanlar HC-06 için geçerli olup modül ayarlarında 3 değişiklik yapılmıştır:
- Veri iletim hızı (baudrate) 115200 yapılmıştır
- Modül ismi değiştirilmiştir: myNanoBot
- Modül şifresi değiştirilmiştir: 5555
Bluetooth modülü ayarları “AT” komut modunda yapılmakta olup HC-05 modülü ile HC-06’nın “AT” modu geçişi ve “AT” komutları arasında farklılıklar vardır.
HC-06, “AT” modu ve iletişim modu olarak 2 moda sahiptir. HC-06 iletişim modunda değilken modül otomatik olarak “AT” modundadır. Yani modüle ilk güç verildiğinde üstündeki led sürekli yanıp sönüyor iken herhangi bir işleme gerek kalmadan “AT” komutları uygulanabilir.
“AT” komutları Arduino seri monitörden girilebilir ve sonuçları izlenebilir. HC-06 bluetooth modülü varsayılan baudrate değeri 9600‘dür. Modül Arduino’ya bağlandıktan sonra (detaylara şu çalışmadan bakılabilir) Arduino’ya yüklenecek kod şöyle olabilir:
//Arduino Uno, Nano vb için -Yazılımsal-
//Bluetooth RX => Arduino TX (Pin 11)
//Bluetooth TX => Arduino RX (Pin 10)
#include <SoftwareSerial.h>
SoftwareSerial myBluetooth(10, 11); // RX, TX
void setup()
{
Serial.begin(9600);
myBluetooth.begin(9600);
Serial.println("AT Komutu Giriniz:");
}
void loop()
{
if (Serial.available())
{
myBluetooth.write(Serial.read()); //AT komutunu bluetooth'a gönder
}
if (myBluetooth.available())
{
Serial.write(myBluetooth.read()); //Bluetooth'dan gelen yanıt
}
}
Arduino Mega için diğer fiziksel seri portlardan biri de kullanılabilir:
//Arduino Mega için
//Bluetooth RX => Arduino TX2 (Pin 16)
//Bluetooth TX => Arduino RX2 (Pin 17)
void setup()
{
Serial.begin(9600);
Serial2.begin(9600); //Bluetooth'un bağlı olduğu fiziksel port
Serial.println("AT Komutu Giriniz:");
}
void loop()
{
if (Serial.available())
{
Serial2.write(Serial.read()); //AT komutunu bluetooth'a gönder
}
if (Serial2.available())
{
Serial.write(Serial2.read()); //Bluetooth'dan gelen yanıt
}
}
“AT” komutları büyük harfle, çift tırnaksız, boşluksuz ve satır sonu karakterleri olmadan (\r\n) girilmelidir. Komutlar sınırlıdır, varsayılan modul ismi/veri iletim hızı görülmez. “AT” komutuna “OK” yanıtı; “AT” modunda çalışıldığını belirtir:

Aşağıdaki komutlar uygulanarak modül ayarları tamamlanmıştır:
| Komut | Beklenen Sonuç | Açıklama |
| AT+NAMEmyNanoBot | OKsetname | Modül ismi myNanoBot olarak değiştirildi |
| AT+PIN5555 | OKsetPIN | Modül eşleşme pini 5555 oldu |
| AT+BAUD8 | OK115200 | Veri iletim hızı 115200 oldu |
Tablodan görüldüğü gibi veri iletim hızını değiştirmek için sayılar kullanılmaktadır. 4 => 9600 (varsayılan) iken 8 => 115200’e karşılık gelmektedir. Diğer veri iletim hızı değerleri ve diğer bazı “AT” komutları için bu adresten yararlanılabilir.
Not: Modül ayarlarında tekrar değişiklik yapabilmek için bluetooth modülü seri iletişiminin artık 115200 bps üzerinden yapılması gerekir. ( myBluetooth.begin(115200); ) Aksi takdirde “AT” komutlarına yanıt alınmayacaktır.
Ayrıca modül ayarlarını tekrar değiştirmek için veri iletim hızının unutulmaması ve bilgisayarların desteklememesi nedeniyle 115200’den yüksek bir değere çekilmemesi birçok kaynakta belirtilmektedir.
Kaynakça
http://www.martyncurrey.com/hc-06-zg-b23090w-bluetooth-2-0-edr-modules/
https://www.instructables.com/id/AT-command-mode-of-HC-05-Bluetooth-module/
https://dergipark.org.tr/tr/download/article-file/1809070
https://erkanduran.wordpress.com/2018/01/04/arduino-seri-haberlesme-ve-bluetooth-uzerinden-led-yakma/
https://github.com/eduran10/myNanoBot
https://erkanduran.wordpress.com/2022/03/28/arduino-nano-tabanli-egitim-robotu-mynanobot/
https://erkanduran.wordpress.com/2022/03/28/arduino-nano-tabanli-bir-egitim-robotu-gelistirilmesi-mynanobot/
Arduino Nano Based Educational Robot: myNanoBot
Arduino Nano Based Educational Robot: myNanoBot
- Easy to programmable as block-based with its own extension
- Supports mBlock v3 Live/Scratch mode
- Adapted Makeblock mBot serial port protocol and firmware
- Low cost
- Open source
- Academic publication
Details: https://github.com/eduran10/myNanoBot
Arduino Nano Tabanlı Eğitim Robotu: myNanoBot
Arduino Nano Tabanlı Eğitim Robotu: myNanoBot
- Kendi uzantısı ile blok tabanlı olarak kolay programlanabilir
- mBlock v3 canlı/Scratch mod desteği
- Uyarlanmış Makeblock mBot seri port protokolü ve aygıt yazılımı
- Düşük maliyet
- Açık kaynak
- Akademik yayın
Detaylar: https://github.com/eduran10/myNanoBot
The Development of an Arduino Nano Based Educational Robot: myNanoBot
The Development of an Arduino Nano Based Educational Robot: myNanoBot
Research Article
Erkan DURAN
Ovakoy Secondary School, Altieylul, Balikesir, Turkey
duran.erkan@gmail.com
(Received:06.06.2021; Accepted:05.11.2021)
DOI: 10.17671/gazibtd.948478
Abstract— The aim of this study is to develop an alternative educational robot to generally preferred ready robot kits in basic coding and robotic educations. For this purpose, easy to supply and assemble by both teachers and students, a low-cost educational robot equipped with various sensors and actuators was developed using open source Arduino microcontroller. And again with written extension by the researcher, the robot can be easily programmed as block-based in mBlock software (version 3.4.12). At time same time, the robot can run applications simultaneously without the need for compilation and upload in mBlock software Scratch mode via USB and bluetooth connection. For this purpose, Makeblock mBot serial port protocol and firmwares of Makeblock electronic modules were adapted to the robot and the robot’s own firmware were created. In the development of the robot, Arduino Nano development card, bluetooth module, ultrasonic distance sensor, light sensor, sound sensor, RGB LED, buzzer, motor driver card and DC motor were used. Tested also with Arduino Uno and Arduino Mega development cards, the robot can be used in basic coding and robotic educations and can be developed by adding different sensors.
Keywords— Arduino, educational robot, mBlock, extension, Scratch mode
Click here to download the full text.
Note: This article was published in the Journal of Information Technologies of Gazi University. Vol: 15 – Issue: 1 / January – 2022
Arduino Nano Tabanlı Bir Eğitim Robotu Geliştirilmesi: myNanoBot
Arduino Nano Tabanlı Bir Eğitim Robotu Geliştirilmesi: myNanoBot
Araştırma Makalesi/Research Article
Erkan DURAN
Ovaköy Ortaokulu, Altıeylül, Balıkesir, Türkiye
duran.erkan@gmail.com
(Geliş/Received:06.06.2021; Kabul/Accepted:05.11.2021)
DOI: 10.17671/gazibtd.948478
Özet— Bu çalışmanın amacı, temel kodlama ve robotik eğitimlerinde genellikle tercih edilen hazır robot kitlerine alternatif bir eğitim robotu geliştirmektir. Bu amaçla hem öğretmenler hem de öğrenciler tarafından temin edilmesi ve montajı kolay; açık kaynak kodlu Arduino mikrodenetleyicisi ile çeşitli aktüatör ve sensörlere sahip düşük maliyetli bir eğitim robotu geliştirilmiştir. İlgili robot, yine araştırmacı tarafından yazılan uzantı ile mBlock yazılımı (3.4.12 sürümünde) blok tabanlı olarak kolayca programlanabilmektedir. Bununla birlikte robot, yapılan uygulamaları herhangi bir derleme ve yükleme işlemine gerek kalmaksızın mBlock yazılımı Scratch modunda USB ve bluetooth bağlantısı üzerinden eş zamanlı bir şekilde çalıştırabilmektedir. Bu amaçla Makeblock mBot seri port protokolü ile Makeblock elektronik modüllerine ait aygıt yazılımları robota uyarlanmış ve robotun kendi aygıt yazılımı oluşturulmuştur. Robotun geliştirilmesinde Arduino Nano geliştirme kartı, bluetooth modülü, ultrasonik mesafe sensörü, ışık sensörü, ses sensörü, RGB LED, buzzer, motor sürücü kartı ve DC motor kullanılmıştır. Arduino Uno ve Arduino Mega geliştirme kartları ile de test edilen robot, temel kodlama ve robotik eğitimlerinde kullanılabilir ve farklı sensörler eklenerek geliştirilebilir.
Anahtar Kelimeler— Arduino, eğitim robotu, mBlock, uzantı, Scratch mod
Tam metni indirmek için buraya tıklayınız.
Not: Bu makale, Gazi Üniversitesi Bilişim Teknolojileri Dergisi’nde yayımlanmıştır. Cilt: 15 – Sayı: 1 / Ocak-2022
Blok Tabanlı ve Metin Tabanlı Arduino Uygulama Örnekleri

Derslerde kullanılabilecek blok tabanlı ve metin tabanlı giriş seviyesi Arduino uygulama örnekleri:
Blok Tabanlı Uygulamalar
- 1- Led Yakma Söndürme
- 2- Polis Çakar
- 3- RGB Led Ortak Anot
- 4- RGB Led Ortak Anot – PWM
- 5- PIR Hareket Sensörü
- 6- HCSR04 – Buzzer
- 7- Analog Değer Okuma – Potansiyemetre – Led Yakma Söndürme
- 8- Potansiyemetre – Belirli Süreyle Led Yakma Söndürme
- 9- Servo Kullanımı
- 10- Bariyer Uygulaması
Metin Tabanlı Uygulamalar
- 1- Led Yakma
- 2- Led Yakma Söndürme
- 3- Led Parlaklığı Ayarlama
- 4- PIR Hareket Sensörü
- 5- Yürüyen Işık
- 6- Potansiyemetre – Led
Ödevler
Bilgisayar Bilimi Dersi – Kur 2 – Robot Programlama Ünitesi Sunuları

Ortaöğretim Bilgisayar Bilimi Dersi – Kur 2 – Robot Programlama ünitesi ders notları sunuları:
- BB2-Ders1-Robot ve Robot Türleri
- BB2-Ders2-Eğitsel Robotta Bileşenler
- BB2-Ders3-mBot Ders Notları (Örnek uygulamalara ayrı ayrı bu başlıktan erişebilirsiniz)
- BB2-Ders4-Ohm Kanunu
- BB2-Ders5-Elektrik Devresi Kurma
- BB2-Ders6-Ölçü Aleti ve Ölçüm Yapma
- BB2-Ders7-Direnç – Voltaj – LDR
- BB2-Ders8-Potansiyemetre
- BB2-Ders9-Arduino Giriş – Led Yakma Söndürme
- BB2-Ders10-Arduino Polis Çakar – RGB Led
- BB2-Ders11-PIR Hareket Sensörü
- BB2-Ders12-Mesafe Ölçme- Buzzer
- BB2-Ders13-Analog Değer Okuma – Potansiyemetre
- BB2-Ders14-DC Motor – Arduino
- BB2-Ders15-Servo Motor – Arduino
- BB2-Ders16-Arduino Metin Tabanlı Giriş – Led Yakma Söndürme
- BB2-Ders17-Arduino Metin Tabanlı Led Parlaklığı Ayarlama
- BB2-Ders18-Arduino Metin Tabanlı PIR Hareket Sensörü
- BB2-Ders19-Arduino Metin Tabanlı Yürüyen Işık Örnek
- BB2-Ders20-Arduino Metin Tabanlı Analog Read
- BB2-Ders21-Arduino Metin Tabanlı RGB Led
Çizgi İzleyen Robot – 4006 TÜBİTAK Bilim Fuarı Projesi
2021 Aralık ayında okulumuzda 4006 TÜBİTAK Bilim Fuarı kapsamında rehberliğimizde öğrencilerim tarafından Bilişim Teknolojileri alanında sergilenen ve sunulan “Ovaköy’de Akıllı Araba” başlıklı -çizgi izleyen robot- projemiz. Kendilerine çalışmalarından dolayı teşekkür eder, başarılar dilerim.
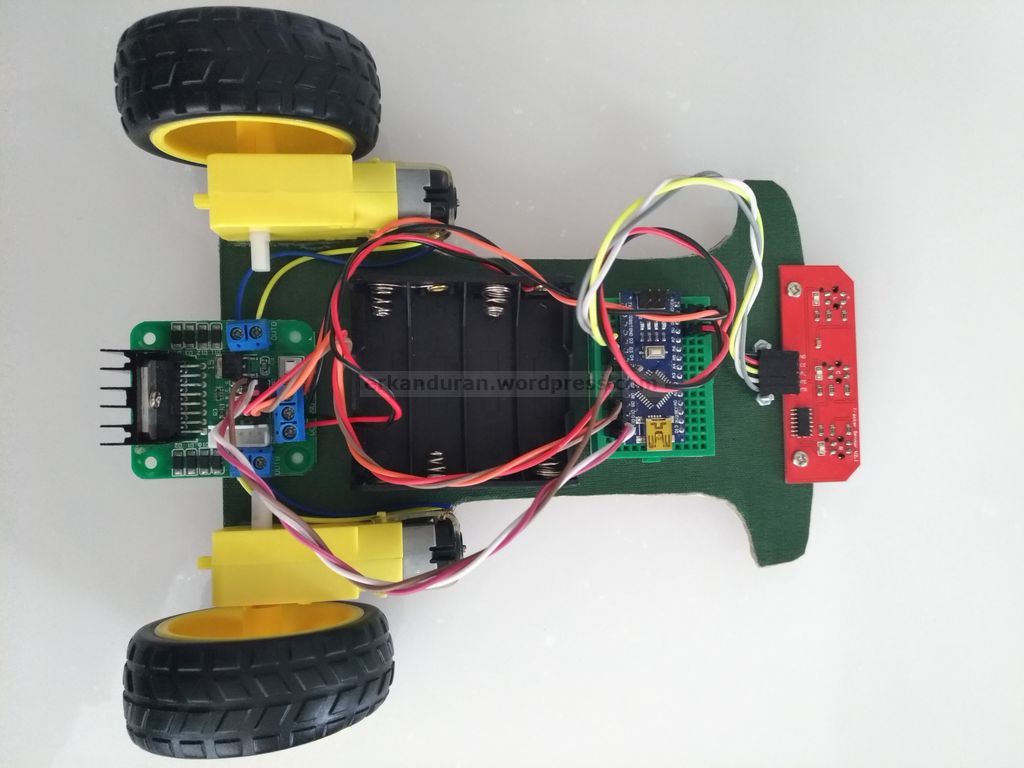
Amaç: Robotik ve kodlama alanında sıkça kullanılan çizgi izleme sensörü, Arduino vb yardımıyla otonom yol takip edebilen bir araba tasarımı gerçekleştirmektir.
Özet: Bilişim Teknolojileri dersinde kullanmayı öğrendiğimiz Arduino, sensörler ve diğer elektronik devre elemanları ile otonom yol takip edebilen bir araba tasarımı gerçekleştirilebilir mi? sorusuna cevap aradık.
Bu konuda daha önceden yapılmış olan çalışmaları ve bu çalışmalarda kullanılan malzemeleri araştırdık. Projemizde ihtiyacımız olan ve kullanacağımız malzemeleri belirledik. Yol takibinin nasıl yapıldığını öğrenip Arduino’yu programlayarak uygun bir tasarım ile projemizi tamamladık.
Yöntem: Öncelikle çizgi takibi yapan robot arabaları ve çizgi takip algoritmalarını araştırdık. Arabamız için gereken temel elektronik malzemeleri belirledik. Çizgi izleme sensörlerinin ve motor sürücü kartlarının nasıl çalıştığını ve Arduino ile nasıl kullanıldığını öğrendik. Önce elektronik devre tasarımını Fritzing programında oluşturduk. Sonra devreyi breadboard üzerinde kurup mBlock programında kodlama yaparak devrenin çalışıp çalışmadığını test ettik. Ardından araba şasesi üzerine devre elemanlarını uygun yerlere yerleştirerek projemizi tamamladık.
Projede Kullanılan Malzemeler
- Arduino Nano: Sensörleri ve devre elemanlarını kontrol etmede/programlamada
- Breadboard: Lehim yapmadan devre kurmada
- Çizgi izleme sensörü (TCRT5000 – 3’lü): Yol takibinde
- Motor sürücü kartı (L298N): Motorların hızını ve yönünü ayarlamada
- DC Motor: Tekerlere güç sağlamada
- Teker: Aracı hareket ettirmede
- Pil (4×1,5V): Enerji sağlamada
- 4’lü pil yuvası: Pilleri birbirine bağlamada
- Jumper kablolar: Lehim yapmadan devre elemanlarını birleştirmede
- Araba şasesi: Devre elemanlarını yerleştirmede
Devre Tasarımı

mBlock Kod Blokları

Sonuçlar: Bu proje kapsamında temel elektronik malzemelerden yararlanarak otonom yol takip edebilen bir araba tasarımı gerçekleştirilmiştir. Öncelikle çizgi takibi yapan robot arabalar ve farklı çizgi takip algoritmaları araştırılmıştır. Gerçekleştirilen araba tasarımının yol takibinde kullanılmak üzere TCRT5000 çizgi izleme sensörü tercih edilmiştir. Çizgi izleme sensöründe 3 adet kızılötesi alıcı ve verici bulunmaktadır. Yol takibinde basit çizgi izleme algoritması kullanılmaktadır. Çizgi takibinin çok çeşitli etmenlere bağlı olarak değiştiği proje sonucunda gözlemlenmiştir.
Öneriler: Başarılı ve verimli çizgi takibinin temel olarak aşağıdaki etmenlere bağlı olduğu görülmüş ve çizgi takibinde bunlara dikkat edilmesi tavsiye edilir:
- Çizgi kalınlığı
- Kızıl ötesi sensörlerin sayısı
- Kızıl ötesi sensörlerin birbiri arasındaki mesafe
- Kızıl ötesi sensörlerin hassasiyeti
- Kızıl ötesi sensörlerin yola göre konumu
- Kızıl ötesi sensörlerin birbirine göre konumu
- Pil gücü
- Çizgi izleme algoritması
Proje Poster Dosyaları
Poster Sol Kısım / Poster Orta Kısım / Poster Sağ Kısım
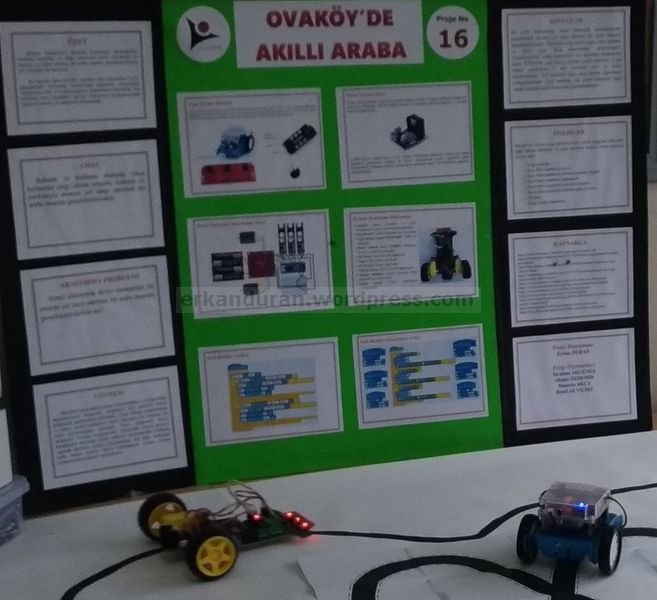
Proje Videosu
Kaynakça
https://www.robotsepeti.com/4-lu-cizgi-izleyen-sensor-seti
https://erkanduran.wordpress.com/2021/03/08/ornek-uygulamalar-ile-mbot-ders-notlari/
https://erkanduran.wordpress.com/2017/05/25/makeblock-mbot-ile-cizgi-izleyen-robot/
https://erkanduran.wordpress.com/2017/05/29/makeblock-mbot-ile-cizgi-izleyen-robot-ledli-versiyon/
https://www.mblock.cc/example/value-of-the-line-follower-sensor/
https://www.muhendisbeyinler.net/cizgi-izleyen-robot-nasil-yapilir/
https://www.robotistan.com/tcrt5000-kizilotesi-sensor
https://www.youtube.com/watch?v=V3d0NdaTH4s
https://www.robotdiyari.com/blog/tcrt5000-k%C4%B1z%C4%B1l-otesi-mesafe-sensoru-nedir
https://elektronikhobi.net/dosya-sharp-kizilotesi-sensorleri/
https://blog.direnc.net/arduino-ile-l298n-motor-surucu-kullanimi/
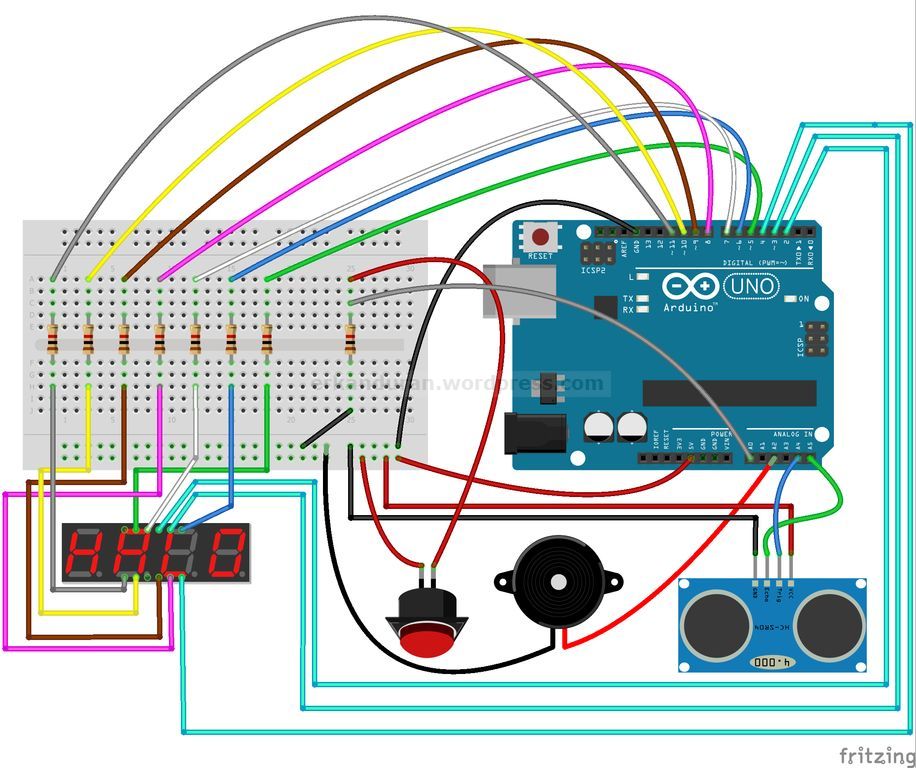
Boy Ölçer – 4006 TÜBİTAK Bilim Fuarı Projesi
2021 Aralık ayında okulumuzda 4006 TÜBİTAK Bilim Fuarı kapsamında rehberliğimizde öğrencilerim tarafından Bilişim Teknolojileri alanında sergilenen ve sunulan “Boy Ölçer” başlıklı projemiz. Kendilerine çalışmalarından dolayı teşekkür eder, başarılar dilerim.




Amaç: Robotik ve kodlama alanında sıkça kullanılan mesafe sensörü, Arduino vb yardımıyla arkadaşlarımızın boyunu ölçebilen bir tasarım gerçekleştirerek bu parçalarla günlük hayattaki problemlere çözüm bulunabileceğini göstermektir.
Özet: Bilişim Teknolojileri dersinde kullanmayı öğrendiğimiz Arduino, sensörler ve diğer elektronik devre elemanları ile arkadaşlarımızın boyunu ölçebilen bir tasarım gerçekleştirilebilir mi? sorusuna cevap aradık.
Bu konuda daha önceden yapılmış olan çalışmaları ve bu çalışmalarda kullanılan malzemeleri araştırdık. Projemizde ihtiyacımız olan ve kullanacağımız malzemeleri belirledik. Boy ölçümünün nasıl yapıldığını öğrenip Arduino’yu programlayarak uygun bir tasarım ile projemizi tamamladık.
Yöntem: Öncelikle boy ölçümü için gereken temel elektronik malzemeleri belirledik. Mesafe sensörünün ve 7 bölümlü led göstergelerin nasıl çalıştığını ve Arduino ile nasıl kullanıldığını öğrendik. Ölçülen mesafe ile nasıl boy hesabı yapılacağını formülleştirdik. Önce elektronik devre tasarımını Fritzing programında oluşturduk. Sonra devreyi breadboard üzerinde kurup mBlock programında kodlama yaparak devrenin çalışıp çalışmadığını test ettik. Ardından karton kutu ve tahta profiller ile bir tasarım gerçekleştirdik. Devre elemanlarını uygun yerlere yerleştirerek projeyi tamamladık.
Projede Kullanılan Malzemeler
- Arduino Uno: Sensörleri ve devre elemanlarını kontrol etmede/programlamada
- Breadboard: Lehim yapmadan devre kurmada
- Mesafe sensörü (HC-SR04): Mesafe ölçümünde
- 4’lü 7 bölümlü led gösterge: Yerden yüksekliği ve boyu görüntülemede
- Düğme (Button): Kalibrasyonda (yerden yüksekliği ölçmede)
- Buzzer (Minik hoparlör): Kalibrasyon sırasında ses çıkarmada
- 9V pil: Enerji sağlamada
- Sürgülü açma/kapama düğmesi: Boy ölçeri çalıştırmada
- Çeşitli değerde dirençler: Led göstergedeki ledlerin önünde akım ayarında
- Jumper kablolar: Lehim yapmadan devre elemanlarını birleştirmede
- Tahta çıtalar: Boy ölçer tasarımında
- Karton kutu: Boy ölçer tasarımında


Devre Tasarımı
mBlock Kod Blokları


Sonuçlar: Bu proje kapsamında temel elektronik malzemelerden yararlanarak boy ölçümü yapabilen bir tasarım gerçekleştirilmiştir. Boy ölçerde, mesafe ölçümü yaygın kullanımı olan HC-SR04 ultrasonik mesafe sensörü ile yapılmaktadır. Boy ölçer masa üstünde çalışabilecek şekilde tasarlanmıştır. Doğru şekilde çalışabilmesi için öncelikle kalibrasyon düğmesi basılı tutularak mesafe sensörünün yerden yüksekliği ayarlanmalıdır. Varsayılan yükseklik değeri 225 cm belirlenmiştir.
HC-SR04 mesafe sensörü, ortam sıcaklığından ve ortamdaki nemden etkilenebilmektedir. Ayrıca HC-SR04 düz yüzeylerde daha doğru sonuçlar vermektedir. Bu nedenle insan saçı ile sensör arasındaki mesafe ölçümünde farklı değerler çıkabilmektedir.
HC-SR04’ün hassaslığı 3mm olmak ile birlikte boy ölçerde yuvarlama fonksiyonları kullanıldığı için boy ölçümünde 1-2 cm hata payı olabilmektedir.
Öneriler
- HC-SR04, düz yüzeylerde daha hassas sonuçlar verebildiğinden; boy ölçümünde mümkünse insanın kafasının üzerine düz bir karton veya kağıt tutulmalıdır.
- Boy ölçümünde daha yüksek hassasiyetli lazer sensörlerin kullanılması daha tutarlı sonuçlar verebilir. Ancak bu sensörlerin fiyatları HC-SR04 mesafe sensöründen oldukça pahalıdır.
- Fazla yüksek olmayan tünel veya üst geçitlerden önce araçların yüksekliği ölçülerek aracın sığmayacağına dair erken uyarı verilebilir.
- Büyük eğlence merkezleri ve lunaparklarda bazı ünitelere girişte boy sınırı belirlenmiştir. Böyle yerlerde bu cihazla hızlıca çocukların boyu hızlıca ölçülebilir.
Proje Poster Dosyaları
Poster Sol Kısım / Poster Orta Kısım / Poster Sağ Kısım

Proje Videosu
Kaynakça
https://www.robocombo.com/Ultrasonik-Mesafe-Sensoru-HC-SR04,PR-1041.html
https://hayaletveyap.com/arduino-ile-ultrasonik-mesafe-sensoru-hc-sr04-kullanimi/
https://diyot.net/hc-sr04-ultrasonik-mesafe-sensoru/
https://erkanduran.wordpress.com/2017/12/11/arduino-ve-hc-sr04-ile-mesafe-olcumu/
https://www.btogrenme.com/arduino-mz80-kizilotesi-sensor/
https://lezzetlirobottarifleri.com/arduino-ile-boy-olcer/
https://www.youtube.com/watch?v=IlfLhmjO3h0
https://www.youtube.com/watch?v=1tiWFQx062Y
https://arduinoblog.yesiltas.net/post/168364840848/arduino-boy-%C3%B6l%C3%A7me-projesini-tamamlay%C4%B1p-kap%C4%B1n%C4%B1n
https://www.youtube.com/watch?v=OT7O61Mj4q8
https://erkanduran.wordpress.com/2017/12/12/arduino-ile-7-segment-display-kullanimi/
https://create.arduino.cc/projecthub/SAnwandter1/programming-4-digit-7-segment-led-display-2d33f8
https://www.dotnetlovers.com/article/10246/what-are-multiplexed-displays-and-use-of-multiplexing
https://koddefteri.net/arduino/temel-arduino-dersleri/arduino-aritmetik-operatorler.html
https://hekimsel.com/saglikli-yasam/boy-nedir-ve-nasil-olculur/#Boy_Nasil_Olculur
https://www.medikalportali.net/boy-olcer-nedir-neden-nasil-kullanilir-duvara-monte-charder-hm200m-urun-ozellikleri-satis-fiyatlari-nelerdir/
https://www.herseyokulicin.com/sevimli-zurafa-200x50cm-boy-olcer-cetveli-9362
https://www.shanghescales.com/product/300G-weight-and-height-machine.html
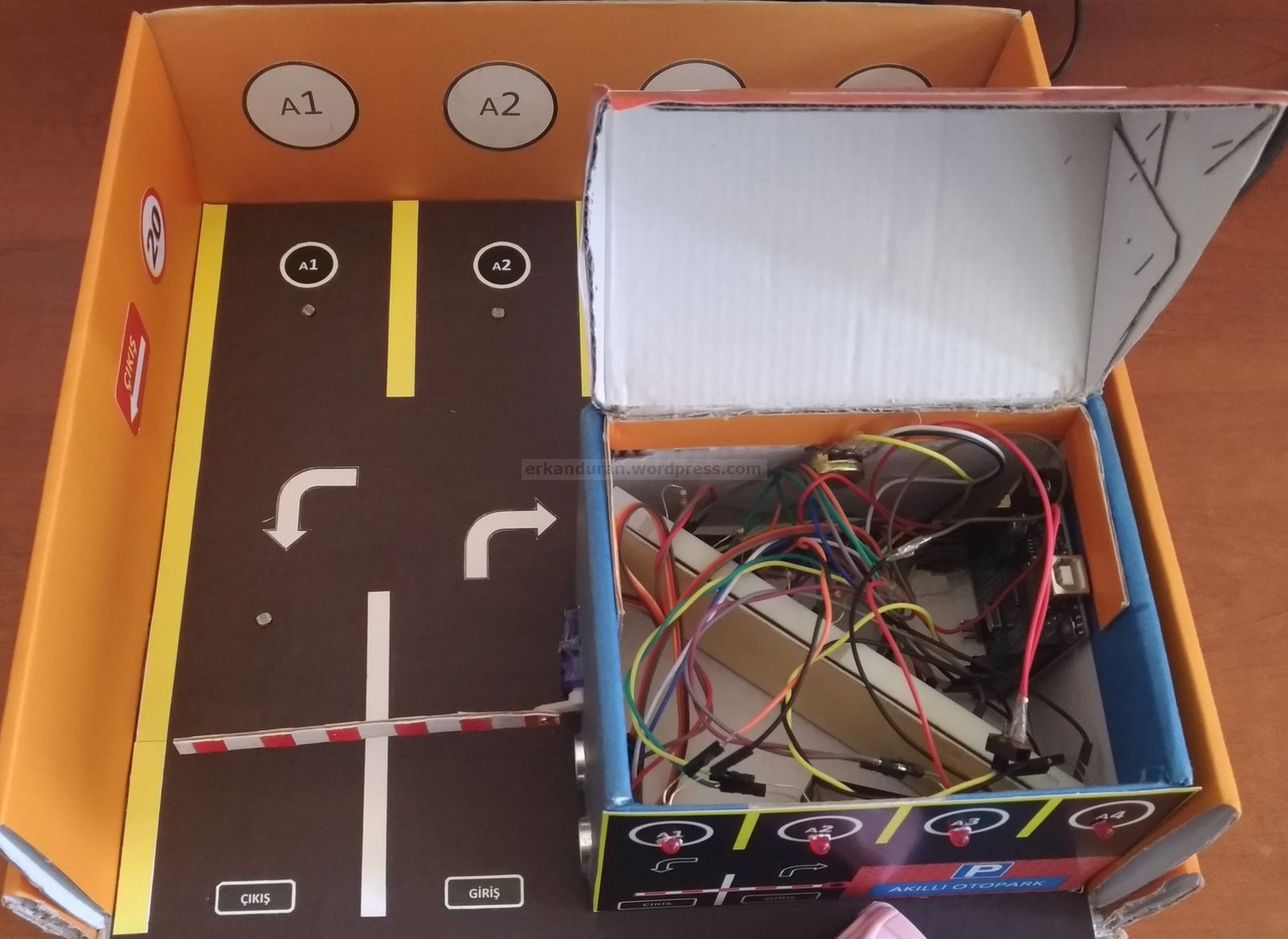
Akıllı Otopark – 4006 TÜBİTAK Bilim Fuarı Projesi
2021 Aralık ayında okulumuzda 4006 TÜBİTAK Bilim Fuarı kapsamında rehberliğimizde öğrencilerim tarafından Bilişim Teknolojileri alanında sergilenen ve sunulan “Akıllı Otopark” başlıklı projemiz. Kendilerine çalışmalarından dolayı teşekkür eder, başarılar dilerim.



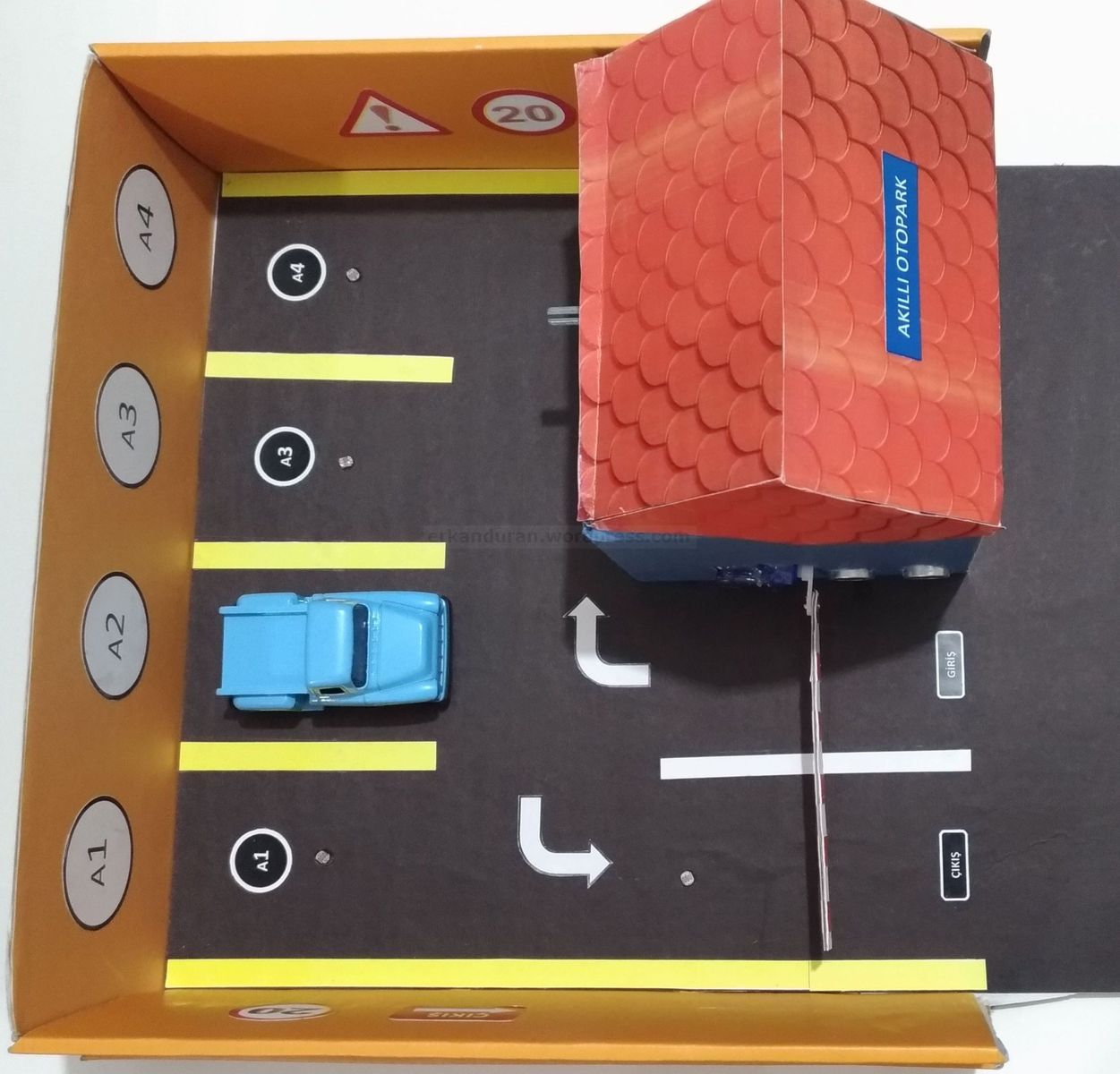
Amaç: Otoparklarda araca boş park yeri bulmada ve park edilen aracın yerini tekrar bulmada kolaylık sağlayan bir tasarım gerçekleştirmektir.
Özet: Büyük otoparklarda ve yer altı kapalı otoparklarda araç park yerlerini bulmak gerçekten zordur. Projemiz kapsamında otoparkların bu konuda nasıl çalıştığını araştırdık. Büyük otoparklarda park yerlerinin numaralandırılması dışında genelde herhangi bir çalışmanın olmadığını gördük. Otoparklarda park yerlerini bulmak için kolaylık sağlayan bir tasarım gerçekleştirilebilir mi? sorusuna cevap aradık.
Bilişim Teknolojileri dersinde kullanmayı öğrendiğimiz Arduino, sensörler ve elektronik devre elemanları ile park yerlerini tespit edebileceğimiz aklımıza geldi. Otopark girişinde otoparkın yukarıdan görünümünü ve boş/dolu park yerlerinin gösterildiği bir ekran ile de bu soruna basit de olsa bir çözüm olabilecek bir tasarım gerçekleştirdik.
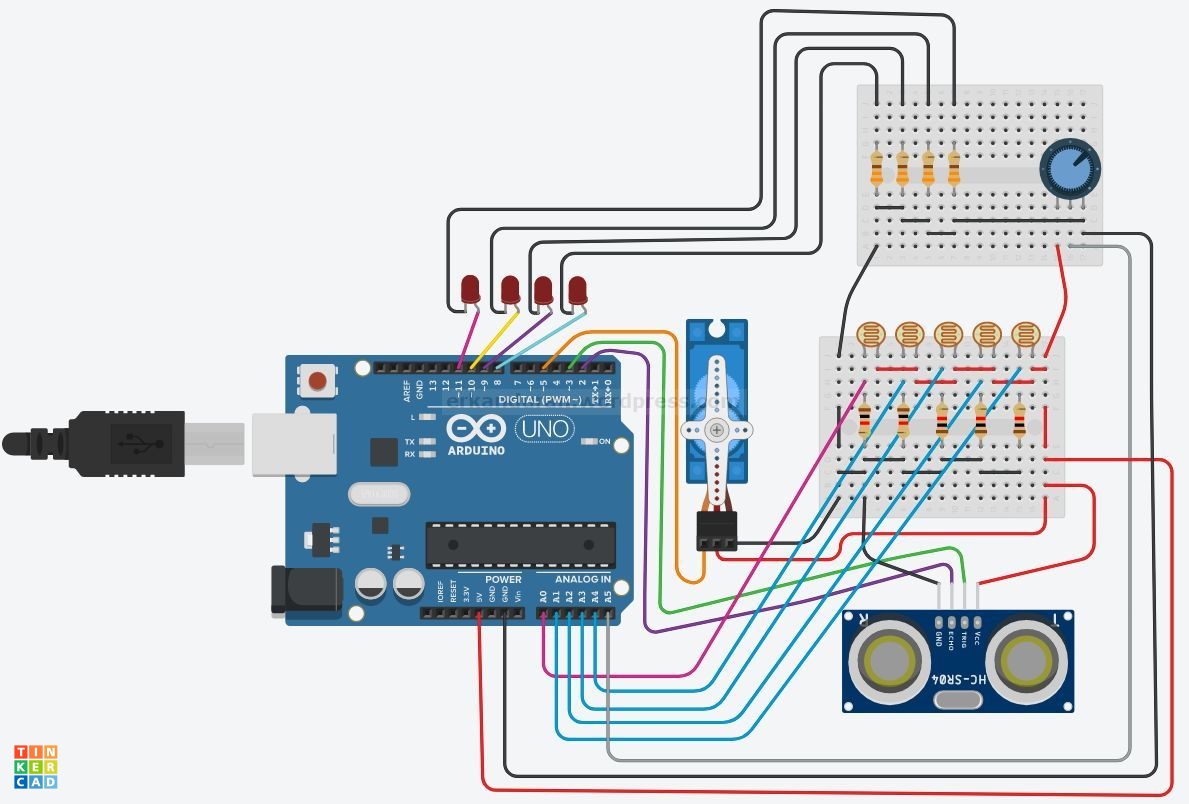
Yöntem: Akıllı otoparkı 4 araçlık planladık. Bunun için gereken temel elektronik malzemeleri belirledik. Önce elektronik devre tasarımını Tinkercad programında oluşturduk. Sonra devreyi breadboard üzerinde kurup mBlock programında kodlama yaparak devrenin çalışıp çalışmadığını test ettik. Ardından kutu, karton ve mukavva kullanarak otoparkı yaptık. Devre elemanlarını uygun yerlere yerleştirilerek projeyi tamamladık.
Projede Kullanılan Malzemeler
- Arduino Uno: Sensörleri ve devre elemanlarını kontrol etmede/programlamada
- Breadboard: Lehim yapmadan devre kurmada
- Işık sensörü (LDR): Park yerlerinde araç olup olmadığını tespit etmede
- Mesafe sensörü (HC-SR04): Otopark girişi araç tespitinde
- Servo motor (SG-90): Bariyeri açıp kapatmada
- Potansiyemetre: Karanlık/ışık hassasiyetinde
- Led: Park yerlerinin boş/dolu olduğunu göstermede
- 9V pil: Enerji sağlamada
- Sürgülü açma/kapama düğmesi: Otoparkı çalıştırmada
- Çeşitli değerde dirençler: Led/LDR önünde akım/voltaj ayarında
- Jumper kablolar: Lehim yapmadan devre elemanlarını birleştirmede
- Karton kutu: Otopark tasarımında
- Mukavva: Otopark tasarımında
Devre Tasarımı
mBlock Kod Blokları

Sonuçlar: Günlük hayatımızda ulaşımda en çok arabaların kullanıldığı ve bu araçlara park yeri bulma konusunda hemen herkesin problem yaşadığı bilinen bir gerçektir. Hatta bu zaman zaman öyle bir hal almaya başlamıştır ki; araçların ücretli veya ücretsiz olarak park edilebildiği büyük otoparklarda ve yer altı kapalı otoparklarda da bu sorunla karşılaşılabilmektedir.
Bu proje kapsamında temel elektronik malzemelerden yararlanarak açık veya kapalı otoparklarda park yeri bulmada sürücülere kolaylık sağlayan bir tasarım gerçekleştirilmiştir. Boş/dolu park yerleri hazırlanan otopark girişindeki ekrandan takip edilebilmektedir. Sürücüler otopark girişinde bu ekrandan boş park alanlarını ve araçlarını bıraktıkları park alanlarının konumlarını görebilmektedirler.
Aynı zamanda bu proje ile temel elektronik devre elemanlarını kullanarak gündelik hayatımızda karşımıza çıkan çeşitli sorunlara nasıl çözüm bulunabildiği uygulamalı olarak görülmüştür.
Akıllı otopark sistemleri ile klasik otopark sorunlarının ortadan kalktığı görülmektedir. Gelişmiş akıllı otopark sistemleri ile gidilecek noktaya en yakın otoparklar ve doluluk oranları mobil uygulamalardan, web sitelerinden ve yol üzerindeki tabelalardan görülebilmekte, güzergâh trafiği hakkında da bilgi sahibi olunabilmektedir. Ayrıca otopark alanı, daha hedefe ulaşmadan imkanlar dahilinde rezerve de edilebilmektedir.
Akıllı otopark sistemleri zamandan ve yakıttan tasarruf sağlamakta, hava kirliliğini ve trafik yoğunluğunu azaltmakta ve ayrıca park bulma konusunda yaşanan stresi de azaltmaktadır.
Öneriler
- Varsa şehrinize özel akıllı şehir uygulamasına dahil olun.
- Hedefe en yakın park edilebilecek yerleri ve bu parkların ne kadar dolu olduğunu öğrenin.
- Güzergâh üzerindeki trafiği dikkate alın.
- Güzergâh üzerindeki tabelalardan otoparkların durumunu takip edin.
- Otopark girişinde ve otopark içinde uygun park yerleri yönlendirmelerini dikkate alın.
- İmkanlar ölçüsünde gideceğiniz otoparktan park yerini rezerve edin.
Proje Poster Dosyaları
Poster Sol Kısım / Poster Orta Kısım / Poster Sağ Kısım

Proje Videosu
Kaynakça
https://www.roltek.com.tr/blog/akilli-sehirler-icin-akilli-park-sistemi/
https://uym.ibb.gov.tr/kurumsal/haberler-ve-duyurular/akilli-park-sistemleri
https://www.netser.com.tr/tr/cozumlerimiz/otopark-yonlendirme-sistemleri
https://www.akillisebekeler.com/bugun-arabayla-cikmazsak-mi/
http://tr.parking-equipment.com/news/parking-lot-guidance-system-22600733.html
https://eem.sakarya.edu.tr/sites/eem.sakarya.edu.tr/file/2-_Muhammet-_1_-89.pdf
http://teta.com.tr/otopark-yonlendirme-sistemleri
http://selerelektronik.com/tag/otopark-bos-yer-gosterim/
https://www.youtube.com/watch?v=Zy64RARGRcA
https://www.youtube.com/watch?v=K1xJChuW_tI
